
Kun Song
Home
CV
Contact:
The University of Hong Kong
Pokfulam Road, Hong Kong
kunsonghku@connect.hku.hk
About Me
I am a Ph.D. sutdent in CS department in The University of Hong Kong (HKU) adviced by Jia Pan. Before that, I obtained my master's degree in RCMVL (Robot Control and Machine Vision Lab) of Shanghai Jiao Tong University (SJTU) advised by Prof. Zhenhua Xiong in 2025. I got my bachelor degree in Mechanical Engeering with honor from SJTU in 2022.
In 2024, I was a research assistant in MSC-Lab at UC Berkely advised by Prof. Masayoshi Tomizuka and Prof. Mingyu Ding.
I am generally interested in enabling robotics systems, like autonomous cars, mobile manipulators, multi-robot system, and humanoids, to interact with the environment intelligently and safely. To be more specific, my research topics lie in the crossing field of perception, planning, control, optimization, foundation models, reinforcement learning, and imitation learning.
- Robot Learning: Reinforcement Learning, Imitation Learning, VLA, LLM, VLM, Diffusion Model;
- Multi-robot System: Cooperative Manipulation, Multi-robot SLAM, Formation Control, Relative Pose Accuracy in a Swarm;
- Robot Perception: Scene Understanding, SLAM System, Light-weight Mapping;
News and Updates
-
Octo. 2025:
Our paper (CollaBot) was accepted by IROS 2025 CIM Workshop
-
Jun. 2025:
Our paper (P2 Explore) was accepted by IROS 2025
-
Mar. 2025:
Our paper (planning for mobile manipulators) was accepted by RA-L
-
Jan. 2025:
Our paper (containmen control) was accepted by TRO, congratulations for Ren
-
Aug. 2024:
Our paper (multi-robot rendezvous) was accepted by RA-L
-
May 2024:
Our paper (RHAML) was accepted by RA-L
-
Apr. 2024:
Our paper (FHT-Map) was accepted by RA-L
-
Jan. 2024:
Create this website
Publications
|
We propose CollaBot, the first generalist framework for simultaneous collaborative manipulation.
First, we use SEEM for scene segmentation and point cloud extraction of the target object.
Then, we propose a collaborative grasping framework, which decomposes the task into local grasp pose generation and global collaboration.
Finally, we design a 2-stage planning module that can generate collision-free trajectories to achieve this task.
|
|
We propose P2 Explore, a framework that predicts the unseen floor plan based in cluttered environments.
Based on the predicted map, we extract room segmentations and generate their topology.
Exploration is accelerated under the guidance of this topology.
|
|
We propose a novel planning framework for complex flipping manipulation by incorporating platform motions and regrasping.
We formulate the planning problem as a set cover problem and determine minimal number of regrasping.
|
|
We propose a containment control law for double-integrator MRSs subject to non-uniform time-varying delays.
The stability is proved by the Lyapunov-Krasovskii function and linear matrix inequalities
|
|
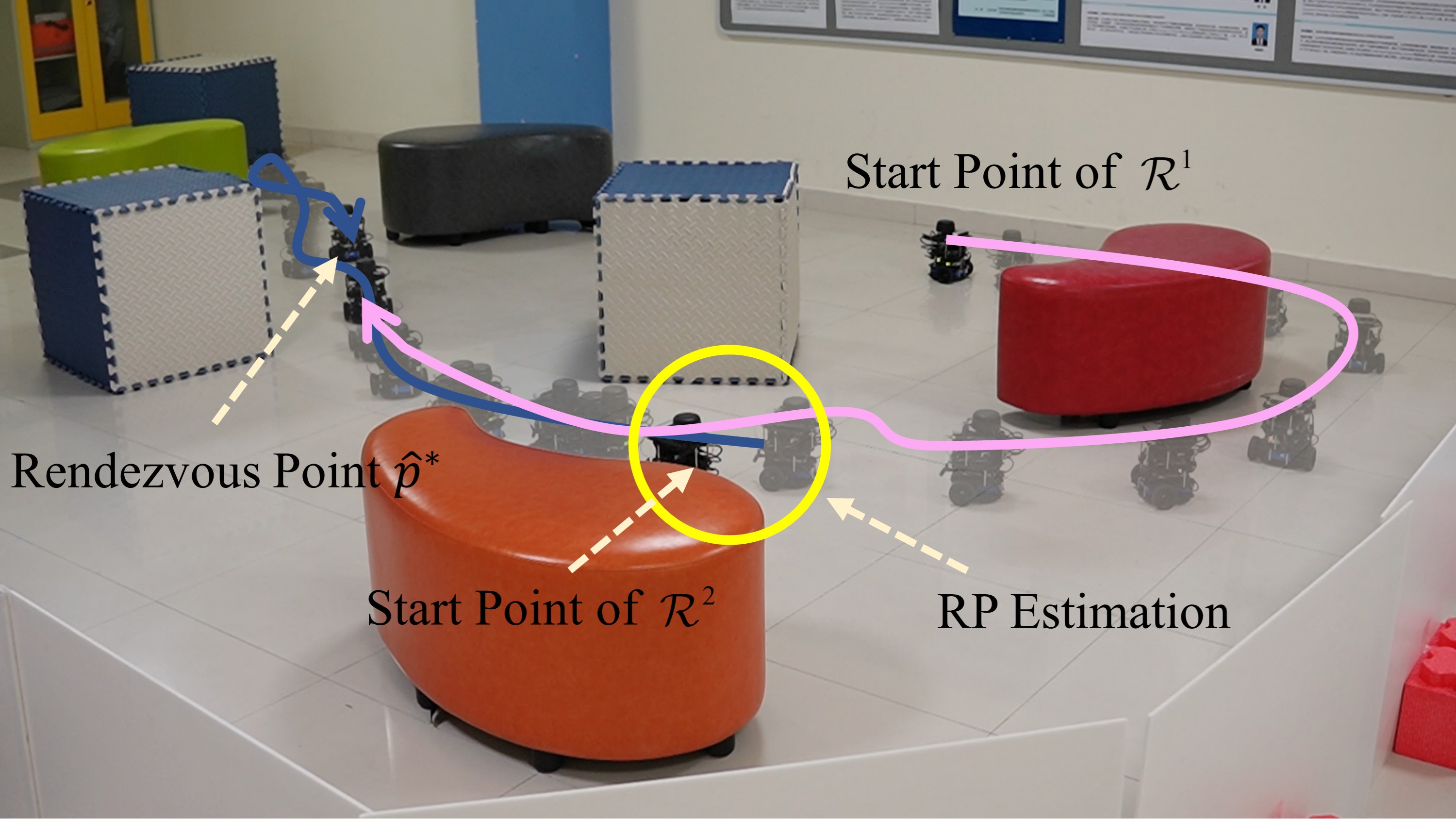
Kun Song, Gaoming Chen, Wenhang Liu, and Zhenhua Xiong Robotics and Automation Letters, 2024
We focus on rendezvous in unknown environments where communication is available.
We divide this task into two steps: rendezvous based environment exploration with relative pose estimation and rendezvous point selection.
A new strategy called partitioned and incomplete exploration for rendezvous (PIER) is proposed to efficiently explore the unknown environment and a rendezvous point can be selected for efficient rendezvous.
|
|
We propose a novel rendezvous-based hierarchical architecture for mutual localization (RHAML).
Anisotropic convolutions are introduced into the network, yielding initial localization results and the iterative refinement module with rendering is employed.
Finally, the pose graph optimization is conducted to obtain more accurate results.
|
|
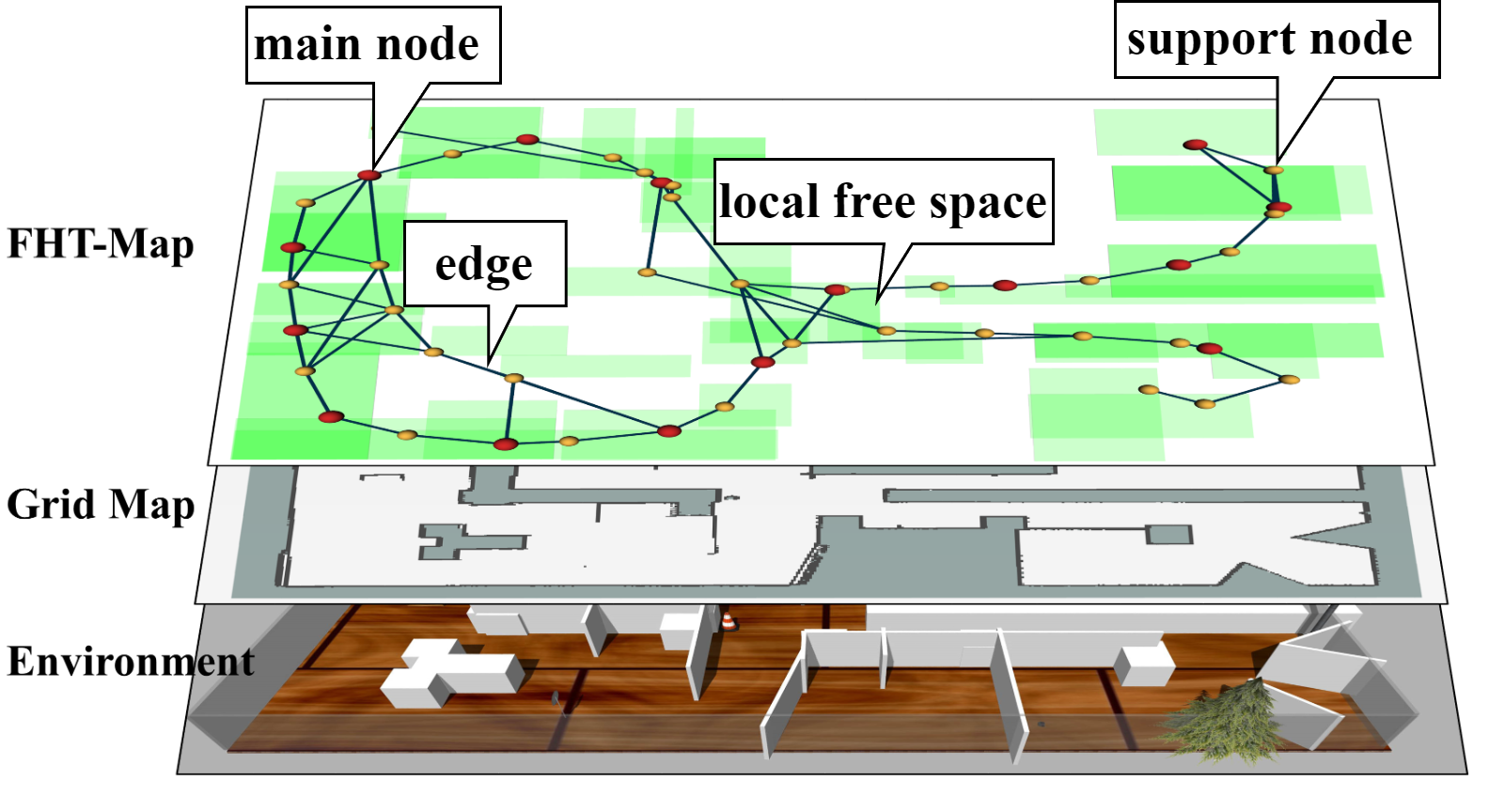
We propose a feature-based hybrid topological map (FHT-Map) which consists of two types of nodes: main node and support node.
Main nodes store compressed visual information and laser scan to enhance subsequent relocalization capability.
Support nodes retain a minimal amount of data to ensure storage efficiency while facilitating path planning.
|
Coming Soon
|
Paper / Code
We propose DLG, a sensor-independent framework, to assess the uncertainty during the multi-robot mutual localization.
We validate the proposed method by implementing it on a place recognition based scenario.
|
|
We present a novel distributed motion control approach aimed at reducing the interaction forces between multiple mobile manipulators.
The stability of the control law is rigorously proven by the Lyapunov theorem and the results are validated in simulations and experiments.
|